Related Posts
 Получение логина и пароля техподдержки 1С из базы
Получение логина и пароля техподдержки 1С из базы Класс для вывода отчета в Excel
Класс для вывода отчета в Excel Счет-фактура для УПП
Счет-фактура для УПП Библиотека классов для создания внешней компоненты 1С на C#
Библиотека классов для создания внешней компоненты 1С на C#- Акт об оказании услуг (со скидками) — внешняя печатная форма для Управление торговлей 11.1.10.86
 Прайс-лист с артикулом в отдельной колонке
Прайс-лист с артикулом в отдельной колонке
Никак не могу придумать зачем это может понадобиться на практике., хотя если ещё калькулятор калорий прикрутить и запись треков с показом на карте…
(1) В смысле? Как раз для ориентирования по складу. Ну или для ремонтников поиск конкретного оборудования в цехах. И еще куча вариантов.
(1) Когда то я занимался теплицами и очень не хватало этого. Сейчас я занимаюсь проектом с большими территориями с наземным хранением и это необходимо. Ну а глобально, если в процессе наработается хорошая точность, то это шаг к автоматизированным складам с небольшими затратами — ну знаете где людей нет, вкалывают роботы)) Ну это так, мечты. Разработкой позиционирования занимаются многие, как я писал Cisco, Нокия занималась да много кто. Это вроде как нужная штука.
(3) Не думали еще дополнительно для большей точности механизмы инерциальной навигации прикрутить?
(2)На сколько я понял, поиск идёт некого терминала, который считывает коды со стелажей и товара. Так что поиск нужен будет только в случае если терминал где-то оставит сотрудник. Оборудование в цехах — ну если только сломанного робота беглеца искать, остальное оборудование либо стационарное, либо тот же терминал, у которого есть хозяин.. 🙂
(5) Угу, стационарное, а как это стационарное оборудование найти если помещение 100×50 метров, и станков сотни? Я скорее говорю не про применимость конкретного решения, а про концепт определения координат внутри помещений по косвенным признакам.
(3)Если можно по подробнее о теплицах — что там на WiFi и требует позиционирования? Про большие территории — опять же отслеживать перемещение сотрудников по их терминалам? Чтобы не спали в тихих уголках? 🙂 Скорее актуально для поиска несанкционированных WiFi устройств.
(6)Концепт хорош, спору нет. Интересно узнать что сподвигло автора на разработку кроме академического интереса.
(4) Честно говоря даже не знал про такое. Если можно скиньте ссылки?
(8) Хотелка заказчика. Чисто эксперимент получится или нет. Такая организация склада сырья что адреса конечно есть но ориентироваться в «вон та куча песка» или «вон тот брус» сложновато
(9) к сожалению несмотря на широту кругозора — он у меня в стиле «слышал о многом, но краем уха»)) Так что все мои знания ограничиваются тем что есть такой способ навигации, и он когда то даже использовался на практике, причем как бы не на механике сделали отображение на бумажной карте текущее. (и вроде как иногда и сейчас используется)
(4) Инерциальная навигация в данном случае не подходит — нет акселерометра и гироскопа чтобы вычислять ускорение и угловые скорости. Но если мониторинг идёт постоянно, то можно ещё сделать проверки «скачков», чтобы не было как в навигаторах в центре Москвы — то ты едешь по Тверской, то бах — и в Шереметьево.
Прикрути создание карты покрытия WiFi сигнала, чтобы в живую можно видеть уровень сигнала WIFI в виде закрашиваемых зон по складу, будет более актуально для контроля устойчивого покрытия
(13) Отличная идея! Так и сделаю
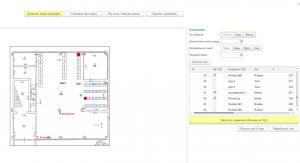
Идея замечательная. Но все же про точность хотелось бы подробнее. Вы пишете что расчет идет в пиксеклях, но Вы же знаете размер картинки и соответствнно можете перевести его на метры ?
(15) Да я пробовал так. При 1 пикселе =11 см примерно, разбег по 1 оси от 0 до 7-8 пикселей примерно. Основная масса примерно в +/-5-6 пикселей попадает. Опять же при условии что стеллажи нарисованы точно там где они есть+сканируют адрес с примерно одинакового расстояния (контроль производится при сканировании адресов) Думаю что точность можно увеличить экспериментируя с сетью.
Очень хороший показатель.
Хорошо!
Добавил в подборку!
(10) Слишком академическая, много если должно быть выполнено.
На практике решается более надежным способом «разметкой пола» и «навесными знаками».
Дмитрий, а какое минимальное количество точек порекомендуете для первоначального обучения?
Кстати, публикация в топе 5 при запросе в Google «позиционирование в помещении»
(20) Мне кажется для прямоугольного помещения — минимально 5 точек — по углам и в центре.
— наверное мало материалов по этой теме
Думаю, что неправильно сформулировал вопрос. Я про набор данных. Обычно же сотнями-тысячами измеряются количество примеров для обучения. Ну если теорию читать.
Возможно, получится развернуть что-то подобное, только на Bluetooth LE.
(22) Сотни тысячи? Это если не вычислять зависимости( чем занимается сеть) а тупо снимать паттерн в каждой точке . Тогда да в каждой точке надо будет померить 3 сигнала (ну или сколько там роутеров), запихнуть в таблицу а потом когда надо определить местоположение типа найти максимально похожий (с минимальными дельтами т.е.) набор значений. Тогда да. Я так понимаю Cisco так делает. Кстати на моей инфраструктуре вы легко можете воспроизвести и этот метод.Но тогда придется побегать по помещению. Альтернатива — триангуляция. Там есть формулы. Но я ленивый человек и не хочу курить формулы, потом еще вносить в них корректирующие коэффициенты (помехи, и расположение роутеров), поэтому аппроксимация возлагается на нейросетку. Насколько я знаю такого метода никто больше не использует, видимо его придумал я)) Но ничего сверхестественного тут нет — это та же триангуляция только вместо формул — аппроксимация на нейросети. Вот и все.
Я экспериментировал с OpenCV — дрессировал на поиск одной конкретной игрушки в кадре — набирал несколько сотен снимков, чтобы работало. Но там задача другая конечно. Еще был какой-то пример с классификацией цветков по размерам чего-то там из Тензор Флоу — там тоже много было примеров. А вот подобное еще не пробовал. Но вопрос позиционирования нейросеткой затронут в каком-то видео Майкрософта на ютуб (смотрел давно, надо будет поискать). И об этом много публикаций в англоязычном интернете. Как правило в PDF сразу — как научный труд).
Хорошая тема, непонятно только зачем использовать именно нейросеть, если конкретно есть измерение уровня сигнала от трех источников, которое может быть сведено к решению уравнения множественной регрессии?
(25) Спасибо. Ну я шел наугад, использовал первое что попалось под руку. Можно и множественную регрессию, да — инфраструктура же есть, алгоритм в 1Ске прикрутить можно любой.